Event Types
Your code enables Misty to autonomously react to her surroundings. To enable this autonomy, you must create skills and robot applications that are driven by events, with logic that listens for and responds to incoming environmental data.
Events Overview
Event data is associated with different event types. The data for these event types comes from many different sources, including:
- Misty's sensors, such as capacitive touch sensors, bump sensors, and time-of-flight sensors
- external hardware, such as the Misty Arduino-compatible backpack
- internal, sensor-enabled processes, such as face recognition, key phrase recognition, and the robot's hazards system
- Misty's software, such as messages from the robot's skill system
- your own skills and applications, such as skill debug messages and custom event triggers
To receive event messages, you must create event listeners. We sometimes refer to the process of creating an event listener as registering for an event. When you register for an event, you can:
- filter out unwanted data by specifying which properties an event message should include
- apply event conditions and validations, or rules that define what kind of data an event listener can receive from a particular event type
- set a debounce value, or how frequently a particular event type should send event messages (this is useful for event types that provide a constant stream of new data, instead of sending data just once when a particular event occurs)
The process for creating an event listener, receiving event data, and handling that data in your code depends on whether you are building an on-device skill or a remote-running robot application that communicates with Misty over a wireless network. Additionally, the implementation details for registering event listeners differ between Misty's JavaScript and .NET SDKs. For instructions and examples that show how to use event data across the different ways you can code Misty, see the following:
- To learn about using Misty's WebSocket server to stream event data to remote-running applications, see Getting Data from Misty
- To learn about using event data in .NET skills, see Registering & Unregistering Events
Note: If your Misty is using the Current version of Misty's WebSocket system, WebSocket event messages do not include SensorName or Type key/value pairs. Use Misty's GetWebsocketVersion command to find out which version your robot is using, and use SetWebsocketVersion to switch versions.
Tip: Some event types (such as TimeOfFlight and ActuatorPosition) stream event messages from a group of related sensors. When you set up a generalized event listener for these event types, you receive messages from every sensor in the group. Because the system defaults to reporting the message from the sensor with the most recently updated data, this can result in a situation where one sensor appears to send messages more frequently than the other sensors in that group, even when using very low debounce values.
To avoid this, we recommend using property tests/event conditions when you register event listeners for event types that report data from more than one sensor. This allows you to configure a listener to handle messages only from one specific sensor in a group. You can register multiple event listeners - each with unique property tests - for any single event type. In this manner, you can create a group of event listeners for a single event type, where each listener is assigned to trigger an event callback only on receiving messages from one specific sensor associated with that event type.
The rest of the topics on this page describe how to use the data associated with each of Misty's event types.
ActuatorPosition
The ActuatorPosition event type provides information about the position of the actuators responsible for controlling the movement of Misty's head and arms. ActuatorPosition data is sent at timed intervals you define when you register for ActuatorPosition messages.
In the ActuatorPosition data object, the value of the sensorName property is the name of the actuator you are receiving information about (Actuator_HeadPitch, Actuator_HeadYaw, Actuator_HeadRoll, Actuator_LeftArm, or Actuator_RightArm). The value property holds a number indicating the position of the actuator (in degrees).
When you subscribe to the ActuatorPosition data stream, you should specify which actuator you want to receive messages about. For example, the following sample code shows how to use a property comparison test to get data from the sensor for the actuator responsible for controlling the movement of Misty's right arm with the on-robot JavaScript API:
// Register for ActuatorPosition data for the actuator for Misty's right arm
misty.AddPropertyTest("ActuatorPosition", "sensorName", "==", "Actuator_RightArm", "string");
misty.RegisterEvent("ActuatorPosition", "ActuatorPosition", 1000, true);
// Callback function that triggers each time ActuatorPosition data is sent
function _ActuatorPosition(data) {
// Do something with the data
}
Sample ActuatorPosition data:
ActuatorPosition {
"eventName": "ActuatorPosition",
"message": {
"actuatorId": "NBQEA0",
"created": "2019-01-09T20:15:38.0870356Z",
"expiry": "2019-01-09T20:15:39.0870356Z",
"sensorId": "ala",
"sensorName": "Actuator_LeftArm",
"value":-5.09
},
"type":"ActuatorPosition"
}
ArTagDetection
The ArTagDetection event type provides information about the value and position of AR Tags. ArTagDetection data is sent at timed intervals you define when you register for ArTagDetection messages, when a tag is within view of the camera.
To receive ArTagDetection events in your skills and robot applications, you must both issue a StartArTagDetector command and register a listener for the ArTagDetection event type.
When starting the detection, you must specify the Ar Tag dictionary id and the tag size in milimeters, where the dictionary options are:
- 4X4_50 = 0
- 4X4_100 = 1
- 4X4_250 = 2
- 4X4_1000 = 3
- 5X5_50 = 4
- 5X5_100 = 5
- 5X5_250 = 6
- 5X5_1000 = 7
- 6X6_50 = 8
- 6X6_100 = 9
- 6X6_250 = 10
- 6X6_1000 = 11
- 7X7_50 = 12
- 7X7_100 = 13
- 7X7_250 = 14
- 7X7_1000 = 15
- ARUCO_ORIGINAL = 16
- APRILTAG_16h5 = 17
- APRILTAG_25h9 = 18
- APRILTAG_36h10 = 19
- APRILTAG_36h11 = 20
The following sample code shows how to start and register for the ArTagDetection event:
// Start Ar Tag Detection with the specified Ar tag dictionary and tag size in milimeters.
misty.StartArTagDetector(7, 144);
// Register for ArTagDetection messages
misty.RegisterEvent("ArTagDetection", "ArTagDetection", 1000, true);
// Callback function that triggers each time ArTagDetection data is sent
function _ArTagDetection_(data) {
// Do something with the data
}
Sample ArTagDetection data:
{
"eventName": "ArTagDetection",
"message": {
"created": "2021-12-01T19:16:21.0132435Z",
"dictionary": 7,
"homogeneousMatrix":
[
0.9958855,
0.01890551,
0.08862634,
0, 0.0283857826,
-0.993857861,
-0.106961422,
0,
0.08605983,
0.109037064,
-0.9903053,
0,
0.0346132144,
-0.0768907145,
0.285792977,
1
],
"sensorId": "cv",
"tagId": 996
}
}
AudioPlayComplete
The AudioPlayComplete event type provides information about stopped or completed audio playback. Misty raises an AudioPlayComplete event for an audio source in the following situations:
- when an audio source finishes playing
- when Misty receives a
StopAudiocommand - when Misty interrupts paused or active playback by starting to play audio from a different source
Note: Text-to-speech utterances that you create with Misty's onboard text-to-speech engine (for example, with the Speak command) do not raise AudioPlayComplete events. To be notified that an onboard text-to-speech utterance is complete, you must register a listener for TextToSpeechComplete events, instead.
An AudioPlayComplete event message includes the following key/value pairs:
- created (string) - The date and time that audio playback completed.
- metaData (object) - An object with details about the audio source associated with this event. Includes:
- name (string) - The filename or URL of the audio source associated with this event.
AudioPlayComplete {
"eventName":"AudioPlayComplete",
"message":{
"created":"2019-04-08T20:54:36.7051135Z",
"metaData":{
"name":"s_Awe.wav",
}
}
}
BatteryCharge
The BatteryCharge event type provides a stream of information about the current state of Misty's battery, including charge percentage, voltage, and charging status. The BatteryCharge event message includes the following key/value pairs:
chargePercent(double) - Decimal value representing current charge percent.created(string) - Timestamp that describes when the system created this message.current(int) - The current flowing into or discharging from the battery. This value is negative when the battery is discharging, and positive when the battery is being charged.expiry(string) - Timestamp describing the moment after which the values in this message should no longer be considered valid.healthPercent(double)isCharging(bool) - Returnstrueif the battery is charging. Otherwise,false.sensorId(string) - ThesensorIdof the system component that returns the battery charge message (charge).state(string) - The charge state of the battery. Possible values are:Charging(if battery is receiving current)Discharging(if battery is losing current)Charged(if battery is fully charged)Unknown(if you check the charge levels before Misty is fully booted, or if the RT board resets and the system has not yet learned the actual battery state)Fault(can occur if the charger does not detect the battery)
temperature(int)trained(bool) - Returnstrueif the battery has been trained. Otherwise,false.voltage(double) - The battery's voltage.
Sample BatteryCharge data:
{
"eventName": "BatteryChargeEvent",
"message": {
"chargePercent": null,
"created": "2019-07-23T16:49:27.558817Z",
"current": -0.441,
"healthPercent": null,
"isCharging": false,
"sensorId": "charge",
"state": "Discharging",
"temperature": 83,
"trained": false,
"voltage": 8.203
}
}
BumpSensor
The BumpSensor data stream sends information each time one of the bump sensors on Misty's base is pressed or released. In the BumpSensor data object, the value of the sensorName property is the name of the bump sensor that triggered the event (Bump_FrontRight, Bump_FrontLeft, Bump_RearRight, or Bump_RearLeft). The value of the isContacted property is a boolean indicating whether the bump sensor was pressed (true) or released (false).The BumpSensor data object also provides “pose” information about Misty at the time of the event.
Sample BumpSensor data:
BumpSensor {
"eventName": "BumpSensor",
"message": {
"created": "2019-01-09T20:32:27.1036178Z",
"expiry": "2019-01-09T20:32:27.2286178Z",
"isContacted": true,
"pose": {
"bearing": -0.5585993432483588,
"created": "2019-01-09T16:36:46.7089139Z",
"distance": 0.14150971628586034,
"elevation": 0,
"frameId": "RobotBaseCenter",
"framesProvider": {
"rootFrame": {
"created": "2019-01-09T16:36:46.6151597Z",
"id": "RobotBaseCenter",
"isStatic": true,
"linkFromParent": {
"isStatic": true,
"parentFrameId": "",
"transformFromParent": {
"bearing": 0,
"distance": 0,
"elevation": 0,
"pitch": 0,
"quaternion": {
"isIdentity": true,
"w": 1,
"x": 0,
"y": 0,
"z": 0
},
"roll": 0,
"x": 0,
"y": 0,
"yaw": 0,
"z": 0
},
"transformToParent": {
"bearing": 3.141592653589793,
"distance": 0,
"elevation": 0,
"pitch": 0,
"quaternion": {
"isIdentity": true,
"w": 1,
"x": 0,
"y": 0,
"z": 0
},
"roll": 0,
"x": 0,
"y": 0,
"yaw": 0,
"z": 0
}
}
}
},
"homogeneousCoordinates": {
"bearing": -0.5585993432483588,
"distance": 0.14150971628586034,
"elevation": 0,
"pitch": 0,
"quaternion": {
"isIdentity": true,
"w": 1,
"x": 0,
"y": 0,
"z": 0
},
"roll": 0,
"x": 0.11999999731779099,
"y": -0.07500000298023224,
"yaw": 0,
"z": 0
},
"pitch": 0,
"roll": 0,
"x": 0.11999999731779099,
"y": -0.07500000298023224,
"yaw": 0,
"z": 0
},
"sensorId": "bfr",
"sensorName": "Bump_FrontRight"
},
"type":"BumpSensor"
}
ChargerPoseMessage
The ChargerPoseMessage event type returns location data for Misty's docking station (also referred to as the charger or charging station).
To use information about the pose of Misty's docking station in your skills and robot applications, you must both issue a StartLocatingDockingStation command and register a listener for the ChargerPoseMessage event type.
Note: This event type is currently in Alpha, and related hardware, firmware, or software is still under development. Feel free to use this data in your skills, but recognize that it may behave unpredictably at this time.
ChargerPoseMessage events include the following key/value pairs:
- created (string) - Timestamp describing when the robot created the message.
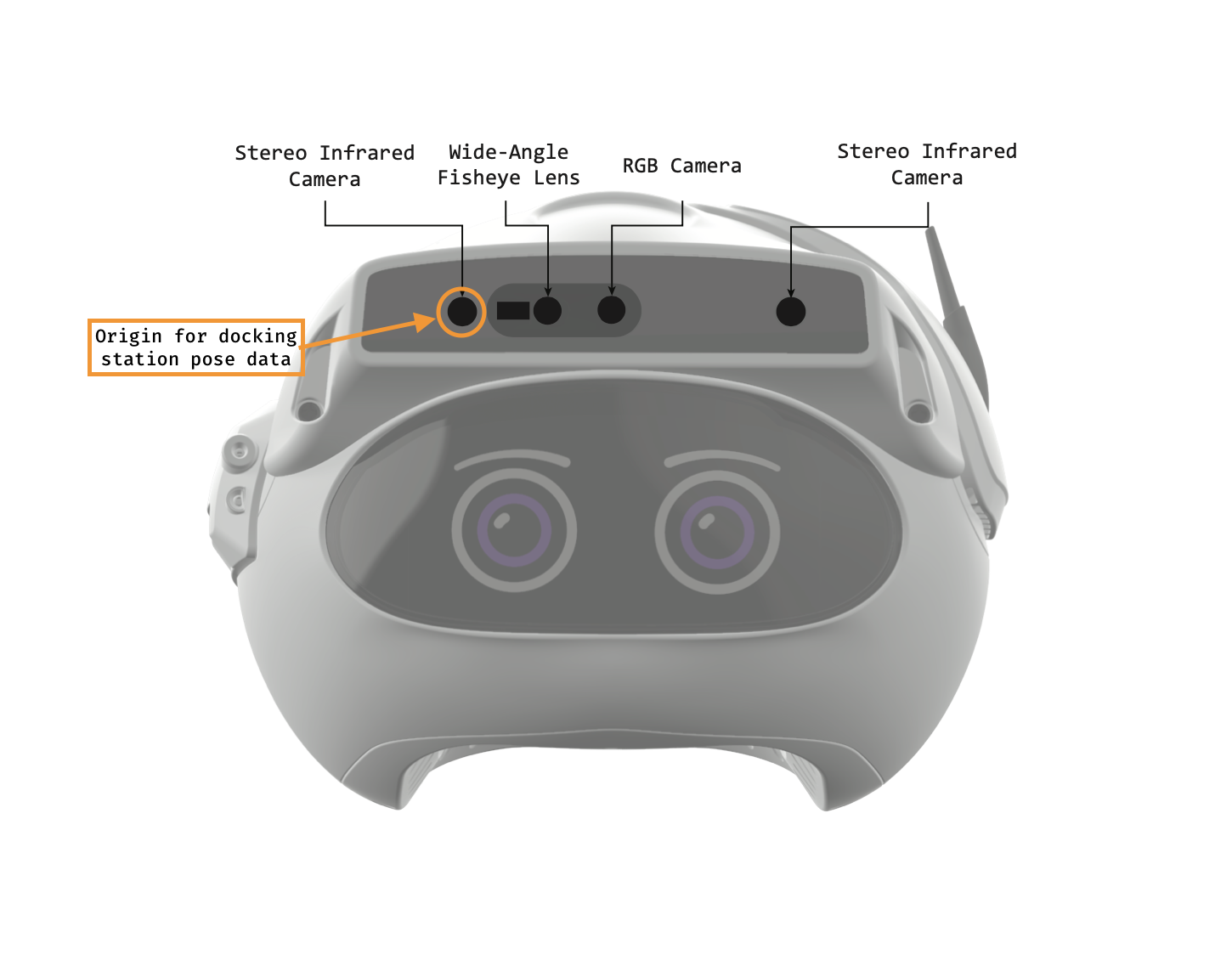
- homogenousMatrix (array) - The docking station's position and orientation (pose) relative to the robot's right infrared (IR) camera, represented as a column major 4x4 homogeneous coordinate matrix. The 3x3 matrix of values in the upper left is the rotation matrix that corresponds to the docking station's orientation, following the XYZ Euler angle convention. The three values in the upper right represent the X, Y, and Z coordinates (in meters) at the point on the docking station over which Misty should be centered in order to receive a charge. The origin (0, 0, 0) point of this data is the front right IR camera in Misty's depth sensor. All data is relative to the depth sensor's frame of reference (Z is forward, X is to the right, and Y is down).
- sensorId (string) - The ID of the sensor associated with this message.
/*
The HomogeneousMatrix array represents the pose of the docking station
as column major 4x4 homogeneous coordinate matrix, relative to the
front right infrared camera in the depth sensor (origin).
R = rotation matrix
Z is forward, X is to the right, and Y is down.
[R00 R01 R02 Tx]
[R10 R11 R12 Ty]
[R20 R21 R22 Tz]
[0 0 0 1 ]
In the sample ChargerPoseMessage data below, the homogenousMatrix array
represents the following matrix:
[ 0.023716189 -0.612703741 0.789956748 -0.01907847 ]
[-0.918981254 -0.3244532 -0.2240616 0.214029372]
[ 0.393587381 -0.720641553 -0.570758045 0.140833944]
[ 0 0 0 1 ]
*/
{
"eventName": "ChargerPoseMessage",
"message":
{
"created": "2020-01-15T16:23:32.0550722Z",
"homogeneousMatrix":
[
0.023716189,
-0.918981254,
0.393587381,
0,
-0.612703741,
-0.3244532,
-0.720641553,
0,
0.789956748,
-0.2240616,
-0.570758045,
0,
-0.01907847,
0.214029372,
0.140833944,
1
],
"sensorId": "slam"
}
}
When you issue a StartLocatingDockingStation command, Misty uses the right infrared (IR) camera in the depth sensor to locate the front four IR reflectors embedded in the docking station. The system uses the location of these reflectors to calculate the pose for the point on the docking station where Misty should be centered to receive the best charge. This point is at the intersection of an imaginary line down the center of the station and the line that connects the two positioning icons on either side.
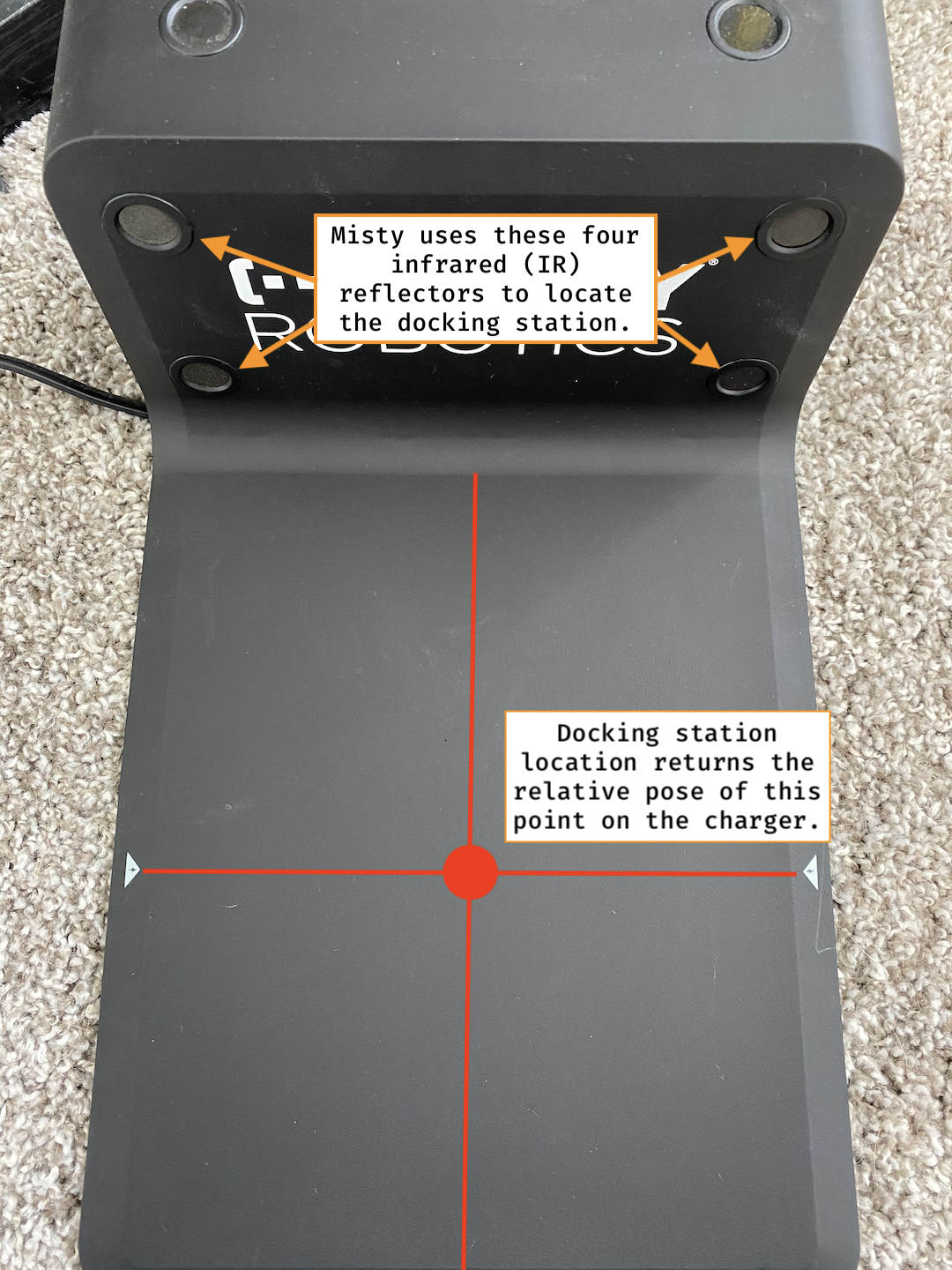
When the robot locates the docking station, ChargerPoseMessage event listeners receive pose data in the form of a column major homogeneous coordinate matrix. The right IR camera in Misty's depth sensor (from the robot's perspective) is the origin point for all docking station pose data.
Once you have obtained the X, Y, and Z coordinates for the docking station's pose relative to the front right IR camera (represented by the values at index 12, 13, and 14 in the homogeneousMatrix array), you can use dead reckoning to calculate drive commands and navigate the robot onto the charger.
Important Notes:
- For best results, we recommend that you do not attempt to locate the docking station while Misty is actively creating a map.
- To get docking station pose, Misty must be between 0.5 and 2 meters away from the docking station. The robot should also be facing in the general direction of the docking station. The station should be inside a cone of +/- 45 degrees originating from the robot's right IR camera.
CriticalStatusMessage
The CriticalStatusMessage event type provides information about issues and critical status changes seen on the robot. CriticalStatusMessage data is sent every time the status changes.
// Register for CriticalStatusMessage data
misty.RegisterEvent("CriticalStatusMessage", "CriticalStatusMessage", 0, true);
// Callback function that triggers each time CriticalStatusMessage data is sent
function _CriticalStatusMessage_(data) {
// Do something with the data
}
Sample CriticalStatusMessage data:
CriticalStatusMessage {
"eventName": "CriticalStatusMessage",
"message": {
"message": "Starting Update... ",
"statuscode": "RobotUpdating",
"timestamp": "2019-01-09T20:15:39.0870356Z"
},
"type":"CriticalStatusMessage"
}
DriveEncoders
The DriveEncoders data stream provides information about the angular velocity (in degrees per second) and rotation (in degrees) for Misty's left and right encoders. DriveEncoders data is sent at timed intervals you define when you register for DriveEncoders messages.
Sample DriveEncoders sensor data:
{
"eventName": "DriveEncodersEvent",
"message": {
"created": "2019-07-23T16:54:05.7372361Z",
"leftDistance": 626,
"leftVelocity": 249,
"rightDistance": 676,
"rightVelocity": 247,
"sensorId": "enc"
}
}
FaceRecognition
You can subscribe to the FaceRecognition WebSocket to obtain data on both face detection and face recognition events.
The EventName value is the name you provide when you register the WebSocket connection.
If face recognition is running on the robot, and a previously trained face is recognized, the Label value is the name previously assigned to that face. The Label value is unknown_person if an untrained/unknown face is detected. The Label value is null if face recognition is not currently running.
Note: The PersonName and Label properties currently provide the same information. PersonName will be removed from FaceRecognition events in a future system update, and you should avoid using it in your skills and robot applications.
TrackId is reserved data that may change in the future.
Sample FaceRecognition data for a face recognition event:
FaceRecognition{
"EventName":"MyFaceRecognition",
"Message":{
"Bearing":-3,
"Created":"2018-07-02T16:26:20.1718422Z",
"Distance":71,
"Elevation":3,
"Expiry":"2018-07-02T16:26:20.9218446Z",
"PersonName":"Face_1",
"Label": "Face_1",
"SensorId":null,
"SensorName":null,
"TrackId":0
},
"Type":"FaceRecognition"
}
FaceTraining
The FaceTraining event type sends messages from Misty's computer vision service with information about the status the face training process.
Tip: To start the face training process, you must issue a StartFaceTraining command.
In addition to created and sensorId fields, FaceTraining messages include the following properties:
isProcessComplete(boolean) - Returnstruewhen the face training process is complete or cancelled due to an error or timing out.message(string) - A message from Misty's computer vision service with information about the status of the face training process. IncludesErrormessages (i.e. when the face training process times out, or when it can't be started because face training is already underway or the value passed in for theFaceIdargument is already in use),Warningmessages (i.e. if Misty detects no faces, more than one face, or if the detected face is too far away), andStatusmessages (i.e. which phase of training is currently underway).messageType(string) - A type label for the sent message (i.e.Warning,Error, orStatus).
// Sample FaceTraining event message
{
"eventName":"FaceTraining",
"message": {
"created":"2019-09-17T19:31:39.2670814Z",
"isProcessComplete":false,
"message":"Face training detection phase complete.",
"messageType":"Status",
"sensorId":"cv"
}
}
HaltCommand
HaltCommand WebSocket data is sent every time the robot stops and contains the date and time of the event. It is not sent at timed intervals.
HazardNotification
Misty sends HazardNotification event messages each time the hazard system detects a change to a hazard state. You can subscribe to HazardNotification events to be notified when Misty enters or exits a specific hazard state. Use this data to have Misty programmatically alter her course or change her behavior in skills that use automated movement and locomotion.
Note: This event type is currently in Alpha, and related hardware, firmware, or software is still under development. Feel free to use this event type, but recognize that it may behave unpredictably at this time.
Each HazardNotification event message includes the following properties:
bumpSensorsHazardState- An array of objects that describe the hazard state for each of Misty's bump sensors. Each object in the array includes asensorNameproperty with a string value for a bump sensor name, and aninHazardproperty with a boolean value indicating whether that bump sensor is in a hazard state. The hazard system considers a bump sensor to be in a hazard state when that sensor is activated/pressed.criticalInternalError- A number indicating the presence of a critical internal error that could prevent the hazards system from functioning. If 0, there is no critical internal error; if 1, there is a communication issue between the firmware and the 410 processor in Misty's headboard; if 2, the system has lost communications with Misty's real-time controller. If you encounter acriticalInternalErrorwith a value of 1 or 2, please contact a member of the Misty support team.currentSensorsHazard- The contents of this property are still under implementation and, for now, can be safely ignored.driveStopped- An array of objects that describe the hazard state for six zones around Misty. Each object in the array includes asensorNameproperty with a string value for a zone, and aninHazardproperty with a boolean value indicating whether that zone is in a hazard state. Data from Misty's time-of-flight and bump sensors can trigger adriveStoppedhazard state.motorStallHazard- The contents of this property are still under implementation and, for now, can be safely ignored.timeOfFlightSensorsHazardState- An array of objects that describe the hazard state for each of Misty's time-of-flight sensors. Each object in the array includes asensorNameproperty with a string value for a time-of-flight sensor name, and aninHazardproperty with a boolean value indicating whether that sensor is in a hazard state. The hazard system considers a time-of-flight sensor to be in a hazard state when the sensor detects a distance greater than a predetermined threshold. The default hazard thresholds for Misty's time-of-flight sensors are 0.215 meters (range sensors) and 0.06 meters (edge sensors).excessiveSpeedHazard- An array of objects that describe whether the velocity for a motor has exceeded safe thresholds, thus triggering a hazard state for that motor. The contents of this property are still under implementation, and theexcessiveSpeedHazardstate is not yet enabled for Misty's head and arm motors. Currently, the system only engages this hazard state when it detects the robot turning at speeds greater than 100 degrees per second. This can sometimes happen as the result of the drive system losing communication with the IMU sensor.
In the following example of a HazardNotification event message, the TOF_DownBackLeft and TOF_DownBackRight time-of-flight sensors are both in a hazard state.
{
"eventName": "HazardNotification",
"message": {
"bumpSensorsHazardState": [
{
"inHazard": false,
"sensorName": "Bump_FrontRight"
},
{
"inHazard": false,
"sensorName": "Bump_FrontLeft"
},
{
"inHazard": false,
"sensorName": "Bump_RearRight"
},
{
"inHazard": false,
"sensorName": "Bump_RearLeft"
}
],
"criticalInternalError": 0,
"currentSensorsHazard": [
{
"inHazard": false,
"sensorName": "CurrentSensor_RightTrack"
},
{
"inHazard": false,
"sensorName": "CurrentSensor_LeftTrack"
},
{
"inHazard": false,
"sensorName": "CurrentSensor_RightArm"
},
{
"inHazard": false,
"sensorName": "CurrentSensor_LeftArm"
},
{
"inHazard": false,
"sensorName": "CurrentSensor_HeadPitch"
},
{
"inHazard": false,
"sensorName": "CurrentSensor_HeadRoll"
},
{
"inHazard": false,
"sensorName": "CurrentSensor_HeadYaw"
}
],
"driveStopped": [
{
"inHazard": false,
"sensorName": "Front right hazard"
},
{
"inHazard": false,
"sensorName": "Front center hazard"
},
{
"inHazard": false,
"sensorName": "Front left hazard"
},
{
"inHazard": false,
"sensorName": "Back right hazard"
},
{
"inHazard": false,
"sensorName": "Back center hazard"
},
{
"inHazard": false,
"sensorName": "Back left hazard"
}
],
"motorStallHazard": [
{
"inHazard": false,
"sensorName": "RightDrive"
},
{
"inHazard": false,
"sensorName": "LeftDrive"
},
{
"inHazard": false,
"sensorName": "RightArm"
},
{
"inHazard": false,
"sensorName": "LeftArm"
},
{
"inHazard": false,
"sensorName": "HeadPitch"
},
{
"inHazard": false,
"sensorName": "HeadRoll"
},
{
"inHazard": false,
"sensorName": "HeadYaw"
}
],
"timeOfFlightSensorsHazardState": [
{
"inHazard": false,
"sensorName": "TOF_Right"
},
{
"inHazard": false,
"sensorName": "TOF_Center"
},
{
"inHazard": false,
"sensorName": "TOF_Left"
},
{
"inHazard": false,
"sensorName": "TOF_Back"
},
{
"inHazard": true,
"sensorName": "TOF_DownFrontRight"
},
{
"inHazard": false,
"sensorName": "TOF_DownFrontLeft"
},
{
"inHazard": false,
"sensorName": "TOF_DownBackRight"
},
{
"inHazard": true,
"sensorName": "TOF_DownBackLeft"
}
]
}
}
Subscribing to HazardNotification Events
You can subscribe to HazardNotification event messages to receive notifications when Misty enters or exits a specific hazard state. You can use this information in your skill code to have Misty make decisions about how to move when autonomously navigating her environment.
The following code provides an example of registering for HazardNotification events in a skill running on Misty using her JavaScript API. In this code, we add return properties for BumpSensorsHazardState and TimeOfFlightSensorsHazardState. This allows us to parse HazardNotification event messages in a callback to understand which sensors are in a hazard state. This example uses HazardNotification messages to turn Misty's chest LED white when it's safe for her to drive, and red when Misty is in a hazard state. We populate an array with the names of the sensors that are in a hazard state, and we print that array to SkillData event listeners with the misty.Debug() method.
misty.Debug("HazardNotification skill starting!");
// White LED means it's safe to drive
// Red LED means Misty is in a hazard state
misty.ChangeLED(255, 255, 255);
misty.AddReturnProperty("Hazard", "BumpSensorsHazardState");
misty.AddReturnProperty("Hazard", "TimeOfFlightSensorsHazardState");
misty.RegisterEvent("Hazard", "HazardNotification", 0, true);
function _Hazard(data) {
var safe = false;
// Print HazardNotification event message & data from
// added return properties
misty.Debug(JSON.stringify(data));
misty.Debug(JSON.stringify(data.AdditionalResults));
const dataIn = data.AdditionalResults;
// Push the name of each sensor that is in a hazard state
// into an array called triggers
var triggers = [];
dataIn.forEach(sensor => {
sensor.forEach(sensorData => {
sensorData.InHazard ? triggers.push(sensorData.SensorName) : {}
});
});
// If the triggers array is empty, it's safe to drive.
// If there are elements in this array, Misty is in
// a hazard state.
triggers.length ? {} : safe = true;
safe ? misty.ChangeLED(255, 255, 255) : misty.ChangeLED(255, 0, 0);
misty.Debug(safe);
misty.Debug(triggers);
}
IMU
The IMU data stream provides information from Misty's Inertial Measurement Unit (IMU) sensor. It includes information about:
- the pitch, yaw, and roll orientation angles of the sensor (in degrees)
- the force (in meters per second) currently applied to the sensor along its pitch, yaw, and roll rotational axes
- the force (in meters per second squared) currently applied to the sensor along its X, Y, and Z axes
Note: Misty's IMU orients its heading to 0/360 degrees each time Misty boots up or resets her real-time controller. For Misty, a yaw value of 0/360 degrees does not represent true north unless Misty is facing true north when the IMU orients its heading. Additionally, because the IMU is located in Misty's torso, readings from the IMU only change when Misty's body moves. They do not change relative to the position of Misty's head.
IMU message properties:
pitch(double) - Misty's orientation on her pitch rotational axis (in degrees). A positive number means Misty is pitched at an angle forward, and a negative number means she is pitched back.roll(double) - Misty's orientation on her roll rotational axis (in degrees). A positive number means Misty is tipped at an angle to her right, and a negative number means she is tipped to her left.yaw(double) - Misty's orientation on her yaw rotational axis (in degrees). (Use this value to determine Misty's current heading when sendingDriveHeadcommands.) A positive number means Misty is rotated to the left, and a negative number means she is rotated to the right.pitchVelocity(double) - The force (in meters per second) currently applied to Misty along herpitchrotational axis.rollVelocity(double) - The force (in meters per second) currently applied to Misty along herrollrotational axis.yawVelocity(double) - The force (in meters per second) currently applied to Misty along heryawrotational axis.xAcceleration(double) - The force (in meters per second squared) currently applied to Misty along herxaxis. A positive value means Misty is accelerating forward, and a negative value means she is accelerating backward.yAcceleration(double) - The force (in meters per second squared) currently applied to Misty along heryaxis. A positive value means Misty is accelerating to her left, and a negative value means she is accelerating to her right.zAcceleration(double) - The force (in meters per second squared) currently applied to Misty along herzaxis. A positive value means Misty is accelerating up, and a negative value means Misty is accelerating down. When Misty is set on a level surface, this value should be a negative number that indicates the force of gravity on Misty's IMU sensor.
IMU {
"eventName": "IMU",
"message": {
"created": "2019-01-09T21:47:53.7607457Z",
"expiry": "2019-01-09T21:47:54.1607457Z",
"pitch":11.193,
"pitchVelocity": 0.057,
"roll": 2.468,
"rollVelocity": -0.1,
"sensorId": "imu",
"sensorName": null,
"xAcceleration": 0.75,
"yAcceleration": 0.73,
"yaw": 2.004,
"yawVelocity": 0.096,
"zAcceleration": 9.80
},
"type":"IMU"
}
By default, Misty sends IMU data to listeners of IMU events once every five seconds.
Tip: Misty uses a right-handed coordinate frame to determine the value of each property returned in IMU event messages.
KeyPhraseRecognized
Misty sends KeyPhraseRecognized event messages when she recognizes the "Hey, Misty!" key phrase.
Note: Misty cannot use her microphones for wake word detection while actively streaming audio and video.
Note: This event type is currently in Beta, and related hardware, firmware, or software is still under development. Feel free to use this event type, but recognize that it may behave unpredictably at this time.
KeyPhraseRecognized event messages include a confidence value that rates system's confidence in having heard the key phrase.
{
"eventName":"KeyPhraseRecognizedEvent",
"message": {
"confidence":81,
"created":"2019-07-31T06:53:18.151743Z"
}
}'
Note
- When you call the
StartKeyPhraseRecognitioncommand, Misty listens for the key phrase by continuously sampling audio from the environment and comparing that audio to her trained key phrase model (in this case, "Hey, Misty!"). Misty does not create or save audio recordings while listening for the key phrase. - To have Misty record what you say (for example, if you want to use speech to invoke other actions), you need to send a
StartRecordingAudiocommand after receiving aKeyPhraseRecognizedevent. You can then do something with that audio file in your code, like hand it off to a third-party service for additional processing. - Misty cannot record audio and listen for the "Hey, Misty!" key phrase at the same time. Sending a command to start recording audio automatically stops key phrase recognition. To have Misty start listening for the key phrase after recording an audio file, you must issue another
StartKeyPhraseRecognitioncommand.
You must start key phrase recognition before Misty can send KeyPhraseRecognized event messages. Follow these steps to code Misty to respond to the "Hey, Misty!" key phrase:
- Invoke the
StartKeyPhraseRecognitioncommand. - Register for
KeyPhraseRecognizedevents. When Misty hears the key phrase, she sends a message toKeyPhraseRecognizedevent listeners. - Write the code to handle what Misty should do when she hears the key phrase inside the
KeyPhrasedRecognizedevent callback. For example, you might have Misty turn to face you or start recording audio to hand off to a third-party service for additional processing.
Note: When Misty recognizes the key phrase, she automatically stops listening for key phrase events. In order to start Misty listening for the key phrase again, you need to issue another StartKeyPhraseRecognition command.
LocomotionCommand
LocomotionCommand WebSocket data is sent every time the linear or angular velocity of the robot changes. It is not sent at timed intervals.
Sample locomotion data:
LocomotionCommand{
"EventName":"LocomotionCommand",
"Message":{
"ActionId":0,
"AngularVelocity":0,
"Created":"2018-04-02T22:59:39.3350238Z",
"LinearVelocity":0.30000000000000004,
"UsePid":true,
"UseTrapezoidalDrive":true,
"ValueIndex":0
},
"Type":"LocomotionCommand"
}
ObjectDetection
The ObjectDetection event type provides information about the type and position of objects. ObjectDetection data is sent at timed intervals you define when you register for ObjectDetection messages, when a valid object is within view of the camera.
To receive ObjectDetection events in your skills and robot applications, you must both issue a StartObjectDetector command and register a listener for the ObjectDetection event type.
When starting the detection, you must specify the minimum confidence, the model id, and the max object tracking history. The higher the tracking history, the more likely the object will be treated as the same object across frames, but it also uses more memory and can be slower. Currently, valid model ids are 0-3 and each process the objects slightly differently using TensorFlow Lite.
The known objects are:
person, bicycle, car, motorcycle, airplane, bus, train, truck, boat, traffic_light, fire_hydrant, stop_sign, parking_meter, bench, bird, cat, dog, horse, sheep, cow, elephant, bear, zebra, giraffe, backpack, umbrella, handbag, tie, suitcase, frisbee, skis, snowboard, sports_ball, kite, baseball_bat, baseball_glove, skateboard, surfboard, tennis_racket, bottle, wine_glass, cup, fork, knife, spoon, bowl, banana, apple, sandwich, orange, broccoli, carrot, hot_dog, pizza, donut, cake, chair, couch, potted_plant, bed, dining_table, toilet, tv, laptop, mouse, remote, keyboard, cell_phone, microwave, oven, toaster, sink, refrigerator, book, clock, vase, scissors, teddy_bear, hair_drier, and toothbrush.
The following sample code shows how to start and register for the ObjectDetection event:
// Start object detection with the minimum confidence, model id, and tracking history.
misty.StartObjectDetector(0.65, 0, 5);
// Register for ObjectDetection messages
misty.RegisterEvent("ObjectDetection", "ObjectDetection", 1000, true);
// Callback function that triggers each time ObjectDetection data is sent
function _ObjectDetection_(data) {
// Do something with the data
}
Sample ObjectDetection data:
{
"eventName": "ObjectDetection",
"message": {
"confidence": 0.8139669,
"created": "2021-12-01T19:58:55.7851953Z",
"description": "tv",
"id": 0,
"imageLocationBottom": 280.026581,
"imageLocationLeft": 0.497694016,
"imageLocationRight": 165.202759,
"imageLocationTop": 147.299713,
"labelId": 72,
"pitch": 0.202373847,
"sensorId": "cv",
"yaw": -0.217731148
}
}
PRUMessage
The PRUMessage event type provides a stream of information from the firmware associated with Misty's wireless Power Receiving Unit (PRU).
The PRU receives power from the Power Transmit Unit (PTU) in Misty's wireless charging station, rectifies the power to direct current (DC), and regulates the power at the required voltage for charging Misty's battery. You can use the data from PRUMessage events when coding Misty to autonomously move to the position on her docking station where she will receive the best charge, as well as for debugging purposes.
To receive data from Misty's PRU firmware in your skills and robot applications, you must register a listener for PRUMessage events. You can stream PRUMessage event data at timed intervals. PRUMessage event data includes the following key/value pairs:
active(bool) - Returnstruewhen Misty's PRU is actively receiving a current from the PTU in the charging station.alignment(int) - Numerical value indicating the alignment of the PRU and PTU charging coils. This value is closer to 100 when Misty's PRU is aligned above the PTU in the robot's wireless charging station. Values closer to 0 indicate Misty's PRU is not aligned well with the PTU in the charging station. (You can expect this value to be near 100 when the arrows on either side of Misty's base are lined up with the arrows on the wireless charging station.)created(string) - When the system created this event message.currentChargeTime(int) - How long (in hours) the PRU has been commanded to operate. (This is set to 24 hours to prevent the PRU from timing out before Misty's battery is fully charged.)firmwareId(int) - Identification number for the firmware associated with Misty's PRU.iout(int) - How much current (in mA) the PRU is supplying to the battery.pruLowVout(bool) - Returnstruewhen the output of the PRU regulator is lower than expected. (Primarily used for troubleshooting.)pruOverPower(bool) - Returnstruewhen the output of the PRU regulator is higher than expected. (Primarily used for troubleshooting.)pruOverTemperature(bool) - Returnstruewhen the temperature of the PRU is too high. (Primarily used for troubleshooting.)pruOverVrect(bool) - Returnstruewhen the rectified voltage is higher than expected. (Primarily used for troubleshooting.)temperature(int) - The temperature of the PRU (in degrees Celsius).vout(int) - The actual output (in mVolts) of the regulator.vrect(int) - The rectified output (in mVolts) the receiving unit supplies to the regulator.
{
"eventName": "PRUMessage",
"message": {
"active": true,
"alignment": 106,
"created": "2020-03-30T19:39:44.5329923Z",
"currentChargeTime": 24,
"firmwareId": 17,
"iout": 2104,
"pruLowVout": false,
"pruOverPower": false,
"pruOverTemperature": false,
"pruOverVrect": false,
"sensorId": "PRU",
"temperature": 25,
"vout": 9305,
"vrect": 23449
}
}
SelfState
The SelfState WebSocket provides a variety of data about Misty's current internal state, including:
battery- Provides information about the state of Misty's battery, including charge percentage, voltage, and charging status.cameraStatus- Provides information about the status of Misty's RGB camera. This information can be useful when you need to check whether the RGB camera is ready or already in use before attempting to use it for another purpose.localIPAddress- Misty's current local IP address. Use this IP address to send Misty REST requests or set up WebSocket connections.location- A data object with information about Misty's current location and orientation ("pose") relative to her currently active occupancy grid.robotRunState- Provides information about Misty's current run state. Misty'scurrentStateisLoadingwhen the system is booting up;Runningwhen the system has fully booted and is not updating; andUpdatingwhen the system is installing an update.slamStatus- The current status of Misty's simultaneous localization and mapping (SLAM) system.SlamStatusevent messages can also be subscribed to independently. See theSlamStatusdocs for more information.
The location, occupancyGridCellMeters, occupancyGridCell, and slamStatus attributes of this event type are not functional with the Misty II Basic Edition.
Note: This event type is currently in Alpha, and related hardware, firmware, or software is still under development. Feel free to use this event type, but recognize that it may behave unpredictably at this time.
There are a number of fields in the event message data structure that are reserved for future use and which may be empty or contain null data:
AccelerationBumpedStateCurrentGoalMentalStatePersonalityPhysiologicalBehavior
SelfState WebSocket messages are sent even if the data has not changed, as the data is sent via timed updates, instead of being triggered by events. The SelfState WebSocket can send data as frequently as every 100ms, though it is set by default to 250ms. To avoid having to handle excess data, you can change the message frequency for the WebSocket with the DebounceMs field, as shown in the lightSocket.js JavaScript helper.
Sample SelfState data:
{
"eventName": "SelfState",
"message": {
"acceleration": {
"units": "None",
"x": 0,
"y": 0,
"z": 0
},
"battery": {
"chargePercent": 0.99,
"created": "2020-02-18T16:47:56.4404619Z",
"current": -0.724,
"healthPercent": 0.55,
"isCharging": false,
"sensorId": "charge",
"state": "Discharging",
"temperature": 0,
"trained": true,
"voltage": 8.127
},
"bumpedState": {
"disengagedSensorIds": [],
"disengagedSensorNames": [],
"disengagedSensors": [],
"engagedSensorIds": [],
"engagedSensorNames": [],
"engagedSensors": []
},
"cameraStatus": {
"isTakingPicture": false,
"onboardCameraStatus": "Ready"
},
"currentGoal": {
"directedMotion": {
"commandGroups": [
{
"arguments": {
"apiCommand": "MoveHead",
"pitch": -0.6632251157578452,
"roll": 0.20943951023931953,
"time": 6.300000000000001,
"velocity": null,
"yaw": 0.3141592653589793
},
"name": "Misty2.HeadActionPlan"
}
],
"id": 425
},
"directedMotionBehavior": "SupersedeOverlapping",
"haltActionSequence": false
},
"localIPAddress": "192.168.7.183",
"location": {
"bearing": -0.007485523933617791,
"bearingThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"distance": 0.33650338286734793,
"distanceThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"elevation": -1.3027658231301418,
"elevationThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"pose": {
"bearing": -0.007485523933617791,
"created": "2020-02-18T16:47:56.6928792Z",
"distance": 0.33650338286734793,
"elevation": -1.3027658231301418,
"frameId": "WorldOrigin",
"framesProvider": {
"rootFrame": {
"created": "2020-02-18T16:34:14.5996575Z",
"id": "RobotBaseCenter",
"isStatic": true,
"linkFromParent": {
"isStatic": true,
"parentFrameId": "",
"transformFromParent": {
"bearing": 0,
"distance": 0,
"elevation": 0,
"pitch": 0,
"quaternion": {
"isIdentity": true,
"w": 1,
"x": 0,
"y": 0,
"z": 0
},
"roll": 0,
"x": 0,
"y": 0,
"yaw": 0,
"z": 0
},
"transformToParent": {
"bearing": 3.141592653589793,
"distance": 0,
"elevation": 0,
"pitch": 0,
"quaternion": {
"isIdentity": true,
"w": 1,
"x": 0,
"y": 0,
"z": 0
},
"roll": 0,
"x": 0,
"y": 0,
"yaw": 0,
"z": 0
}
}
}
},
"homogeneousCoordinates": {
"bearing": -0.007485523933617791,
"distance": 0.33650338286734793,
"elevation": -1.3027658231301418,
"pitch": -0.6325809359550476,
"quaternion": {
"isIdentity": false,
"w": 0.932397366,
"x": 0.1152967,
"y": -0.295654356,
"z": 0.173003957
},
"roll": 0.1402051281565929,
"x": 0.08911462873220444,
"y": -0.0006670821458101273,
"yaw": 0.32096892986530595,
"z": 0.3244883120059967
},
"pitch": -0.6325809359550476,
"roll": 0.1402051281565929,
"x": 0.08911462873220444,
"y": -0.0006670821458101273,
"yaw": 0.32096892986530595,
"z": 0.3244883120059967
}
},
"mentalState": {
"affect": {
"arousal": 0,
"dominance": 0,
"valence": 0
},
"created": "2020-02-18T16:47:56.6928792Z",
"personality": {
"agreeableness": 0,
"conscientiousness": 0,
"extraversion": 0,
"neuroticism": 0,
"openness": 0
},
"physiologicalBehavior": {
"hunger": {
"isEating": false,
"level": 0
},
"sleepiness": {
"isSleeping": false,
"level": 0
}
}
},
"occupancyGridCell": {
"x": 0,
"y": 0
},
"occupancyGridCellMeters": 0,
"robotRunState": {
"currentState": "Running",
"message": "Robot is operational.",
"previousState": "Loading",
"timestamp": "2020-02-18T16:34:23.974733Z"
},
"serialMessages": [],
"slamStatus": {
"runMode": "Exploring",
"sensorStatus": "Streaming",
"status": 32900,
"statusList": [
"Exploring",
"HasPose",
"Streaming"
]
},
"touchedState": {
"disengagedSensors": [],
"engagedSensors": []
}
}
}
SerialMessage
The SerialMessage data stream provides information sent to Misty by external hardware connected to the ports on her back. SerialMessage events trigger when Misty receives data sent through one of these ports.
To send SerialMessage data to Misty from an Arduino, use:
// ARDUINO
Serial.println("<your_data_to_Misty>")
Sending data to Misty as a JSON string can make it easier to parse the data in your skill code. This example shows how you can format data from a temperature and pressure sensor connected to an Arduino:
// ARDUINO
Serial.println("{\"temperature\":\""+String(<temp_value>)+"\",\"pressure\":\""+String(<pressure_value>)+"\"}");
Handle this data with Misty's on-robot JavaScript API by registering for SerialMessage events. Add SerialMessage as an additional return property, and parse the data in the _SerialMessage() callback that triggers when the data is ready.
// MISTY
// Register for SerialMessage events and add SerialMessage as a return property
misty.AddReturnProperty("SerialMessage", "SerialMessage");
misty.RegisterEvent("SerialMessage", "SerialMessage", 0, true);
function _SerialMessage(data) {
if(data !== undefined && data !== null) {
// Parse SerialMessage data and assign it to a variable
var obj = JSON.parse(data.AdditionalResults[0].Message);
var temp = obj.temperature;
var pressure = obj.pressure;
}
}
SkillData
Subscribe to the SkillData named object to see debug messages, error messages, and other data JavaScript skills publish during skill execution. Use the misty.Debug() command in a skill to send a SkillData message.
The value of the BroadcastMode parameter in a skill's .json meta file determines when the skill sends SkillData messages, and what kind of data those messages include.
Off- The skill does not sendSkillDatamessages.Debug- The skill prints error and debug messages toSkillDataevents.Verbose- In addition to error and debug messages, the skill sends a message for each command that Misty receives toSkillDataevents.
When you connect Misty to the Skill Runner to start and stop skills, the web page subscribes to SkillData events and skill messages print to the console in your web browser. You can create your own subscription to SkillData messages by connecting to Misty's WebSocket server.
SkillData Message Examples
This sample shows the SkillData message sent when a skill executes the misty.Debug() command with the string "Hello, world!":
{
"eventName": "SkillData",
"message": {
"data": {
"data": "Hello, world!"
},
"message": "Calling command 'Debug'",
"timestamp": "2019-04-28T22:29:33.0441867Z",
"truncated": false
}
}
This sample shows the SkillData message sent when a skill executes a misty.SendExternalRequest() command. The message.data object provides information about the values passed in for the command's arguments.
{
"eventName": "SkillData",
"message": {
"data": {
"method": "GET",
"resource": "http://soundbible.com/grab.php?id=1949&type=mp3",
"authorizationType": "null",
"token": "null",
"arguments": "null",
"save": true,
"apply": true,
"fileName": "sound",
"callback": "null",
"callbackRule": "null",
"skillToCall": "null",
"prePauseMs": 0,
"postPauseMs": 0
},
"message": "Calling command 'SendExternalRequest'",
"timestamp": "2019-04-28T22:29:33.0285627Z",
"truncated": false
}
}
Subscribing to SkillData Events
To subscribe to SkillData events, you open a WebSocket connection to Misty and send a subscription message to the SkillData named object.
This example shows how to subscribe to SkillData events in a web page using the WebSocket API. In the example, SkillData messages print to the web browser's console.
//Misty's IP address
const ip = "<robot-ip-address>";
function streamSkillData() {
//Open a WebSocket connection to Misty
const ws = new WebSocket("ws://" + ip + "/pubsub");
//Send a message to subscribe to SkillData events
ws.onopen = function(event) {
ws.send(JSON.stringify(
{
"Operation": "subscribe",
"Type": "SkillData",
"DebounceMs": null,
"EventName": "SkillData",
"Message": "",
"ReturnProperty": null
}
));
}
//Parse and log SkillData messages
ws.onmessage = function(event) {
var data = event.data
console.log(data);
};
};
streamSkillData();
Before you close the WebSocket connection, send a message to unsubscribe to SkillData events. You cannot set up a SkillData subscription when there is an open subscription with the same EventName you are trying to subscribe to.
ws.send(JSON.stringify(
{
"Operation": "unsubscribe",
"EventName": "SkillData",
"Message": ""
}
));
ws.close();
SkillSystemStateChange
The system triggers a new SkillSystemStateChange event each time you add, start, stop, or remove a skill from the robot. Each SkillSystemStateChange message includes the following properties:
- action - The action (
Initiatlized,Started,Stopped,Added, orDeleted) that triggered theSkillSystemStateChangeevent.Initializedmeans the skill was loaded into the robot's skill system;Startedmeans the skill started running;Stoppedmeans the skill was cancelled;Addedmeans the skill was added to the skill system;Deletedmeans the skill was removed from the robot. - guid - The unique GUID for the skill that triggered the
SkillSystemStateChangeevent. - name - The name of the skill that triggered the
SkillSystemStateChangeevent. - timestamp - When this event occurred.
{
"eventName": "SkillSystemStateChange",
"message": {
"action": "Stopped",
"guid": "8426260c-2b6b-41e8-bd3f-2ca611a61774",
"name": "capTouch",
"timestamp": "2020-01-10T20:44:15.383797Z"
}
}
SlamStatus
Misty's SlamStatus event messages provide information about the current status of Misty's simultaneous localization and mapping (SLAM) system.
This event type is not functional with the Misty II Basic Edition.
Note: Misty's SLAM capabilities are an alpha feature. Experiment with mapping, but recognize that Misty's ability to create maps and track within them is unreliable at this time.
SlamStatus messages include the following properties:
status(int) - Number that describes the current status of the SLAM system. This number updates with information from thesensorStatusandrunModefields, as well as with other events that occur during a SLAM session. Note that this number represents several status codes simultaneously. You can convert this number to a binary value to see whether the bit field for a given status code is on (1) or off (0). As an example, the status code33028converts to a binary value of1000000100000100. In this binary value, the 3rd, 9th, and 16th bits are flipped. Those bits correspond to the status codes forExploring,LostPose, andStreaming, respectively. (Note that the system also returns the string fields for all current status codes to thestatusListarray that comes back with aSlamStatusevent message.) The following hexadecimal values correspond to bit fields for each possible status code:- 0x0000:
Uninitialized- The SLAM system is not yet initialized. - 0x0001:
Initializing- The SLAM system is initializing. - 0x0002:
Ready- Misty's depth sensor and the SLAM system are ready to start mapping and tracking. - 0x0004:
Exploring- The SLAM system is mapping. - 0x0008:
Tracking- The SLAM system is tracking. - 0x0010:
Recording- The SLAM system is recording an.occfile to Misty's local storage. - 0x0020:
Resetting- The SLAM system is in the process of shutting down and resetting. - 0x0040:
Rebooting- The SLAM system is rebooting. - 0x0080:
HasPose- The SLAM system has obtained pose. - 0x0100:
LostPose- The SLAM system has lost pose after having obtained it. - 0x0200:
Exporting_Map- The SLAM system is exporting a map after mapping is complete. - 0x0400:
Error- There is an error with the SLAM system or with the depth sensor. - 0x0800:
Error_Sensor_Not_Connected- The depth sensor is not connected. - 0x1000:
Error_Sensor_No_Permission- The system does not have permission to use the depth sensor. - 0x2000:
Error_Sensor_Cant_Open- The system cannot open the depth sensor for communication. - 0x4000:
Error_Error_Power_Down_Robot- Unrecoverable error. Power down the robot and restart. - 0x8000:
Streaming- The SLAM system is streaming. - 0x10000:
Docking_Station_Detector_Enabled- The docking station detector is enabled. - 0x20000:
Docking_Station_Detector_Processing- The docking station detector is processing frames.
- 0x0000:
statusList(array) - A list of the string values that describe the current status of the SLAM system. Can contain any of the values represented by thestatusfield.runMode(string) - Current status of the navigation system. Possible values are:UninitializedTrackingExploringRelocalizingPausedExportingSceneNeedMoreMotionToInitMapNotAvailable
sensorStatus(string) - Current status of the depth sensor sensor. Possible values are:UninitializedConnectedBootingReadyDisconnectedErrorUSBErrorLowPowerModeRecoveryModeProdDataCorruptCalibMissingOrInvalidFWVersionMismatchFWUpdateFWUpdateCompleteFWUpdateFailedFWCorruptEndOfFileUSBDriverNotInstalledStreaming
Note: We suggest primarily using the values of Status/StatusList when coding SLAM functionality in your skills and robot applications, and only using the SensorStatus and RunMode values as supplemental information if needed or for debugging purposes.
Example SlamStatus event message:
{
"eventName":"SlamStatus",
"message": {
"slamStatus": {
"runMode":"Uninitialized",
"sensorStatus":"Connected",
"status":2,
"statusList":["Ready"]
}
}
}
SourceTrackDataMessage
The SourceTrackDataMessage named object provides information about the location and volume of the noise or spoken voice that Misty can detect.
Note: Misty only sends audio localization event messages when she is actively recording audio. When using audio localization data in your skills, you need to call the misty.StartRecordingAudio() method in order to receive SourceTrackDataMessage or SourceFocusConfigMessage event messages.
This event type is currently in Beta, and related hardware, firmware, or software is still under development. Feel free to use this event type, but recognize that it may behave unpredictably at this time.
Audio localization messages include the following data:
DegreeOfArrivalNoise: An array where each element is a value between 0-360 that indicates the angle of arrival for a noise that Misty detects. This array can contain the degree of arrival noise for up to three unique sounds. Each value in this array represents the degree of arrival for a single sound.DegreeOfArrivalSpeech: A value between 0-360 that indicates the angle relative to Misty where she detected the loudest voice.TimeOffset: The time (in milliseconds) that Misty captured the audio sample relative to the start time of the audio recording. Misty records samples at roughly 20hz, or once every 50ms.VoiceActivityPolar: A 360 element array where each element is a value between 0 and 255 that indicates the level of sound activity detected at a particular angle. The higher the value, the more voice activity detected.VoiceActivitySectors: A four element array of boolean values indicating whether Misty detected voice activity in a particular sector. Each sector represents a 90 degree wedge of the area surrounding Misty. The front-facing wedge is offset, with Misty's face pointing toward the 45 degree angle down its center.
Sample SourceTrackDataMessage response data:
{
"eventName": "SourceTrackDataMessageEvent",
"message": {
"degreeOfArrivalNoise": [90],
"degreeOfArrivalSpeech": 360,
"timeOffset": 4925,
"voiceActivityPolar": [6,6,6,5,5,5,5,5,5,4,4,3,3,3,2,2,2,2,2,2,2,2,2,2,2,2,3,3,3,3,3,3,3,3,3,4,4,4,3,3,2,2,3,5,6,5,4,4,4,5,6,6,6,7,7,8,8,9,9,9,9,9,10,10,10,10,10,10,9,9,9,10,10,10,9,8,7,7,7,7,8,8,8,7,7,7,6,6,5,5,5,4,4,4,4,3,3,3,2,1,1,0,0,1,1,1,1,1,1,1,1,1,1,1,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,1,2,3,3,4,4,5,5,6,6,7,8,8,8,9,9,9,9,9,9,9,9,8,8,8,8,7,7,6,6,5,5,3,2,1,3,4,4,3,2,1,1,2,3,3,4,4,4,4,3,2,1,2,2,3,3,4,4,3,3,2,4,5,5,4,4,4,5,5,5,6,5,5,5,5,4,4,5,5,4,3,3,4,5,5,5,4,4,4,4,4,5,5,4,3,2,1,1,1,1,1,2,2,2,3,3,2,2,2,2,2,2,3,3,3,3,3,3,3,3,4,4,4,4,4,4,5,5,5,5,5,5,5,5,5,5,5,5,4,4,3,1,1,1,1,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,1,1,1,2,3,3,4,5,5,5,6,6,7,8,8,8,8,8,8,8,9,9,9,9,8,8,8,7,7,7,7,7,6,6,6,6,6,6,6,6,6,6],
"voiceActivitySectors": [false, false,false, false ]
}
}
SourceFocusConfigMessage
The SourceFocusConfigMessage named object provides meta information about the configuration of audio localization data. The system only sends this message once, when Misty starts recording audio.
Note: Misty only sends SourceFocusConfigMessage data once, when she starts recording audio. When using audio localization data in your skills, you need to call the misty.StartRecordingAudio() method in order to receive SourceTrackDataMessage or SourceFocusConfigMessage event messages.
This event type is currently in Beta, and related hardware, firmware, or software is still under development. Feel free to use this event type, but recognize that it may behave unpredictably at this time.
GainStep: A value that indicates the spatial gain applied to the sector where Misty detects a voice. You can safely ignore this value.SectorsEnabled: A four element array of boolean values that indicate whether audio localization is enabled for a given sector. At this time, all sectors are enabled be default and cannot be disabled.SectorStartAngles: A four element array of integer values between 0 - 360 indicating the angle bounding the start of a given sector. Each sector represents a 90 degree wedge of the environment that surrounds Misty. Each sector stops at the angle where the next sector begins. These sectors correspond to theVoiceActivitySectorsarray in theSourceTrackDataMessagenamed object.
Sample SourceFocusConfigMessage response data:
{
"eventName": "SourceFocusConfigMessageEvent",
"message": {
"gainStep": 65535,
"sectorsEnabled": [true, true, true, true],
"sectorStartAngles": [135,45,315,225]
}
}
TextToSpeechComplete
Misty raises a TextToSpeechComplete event when an onboard text-to-speech utterance finishes playing or is interrupted.
To receive TextToSpeechComplete event messages in your skills and robot applications, you must register a listener for TextToSpeechComplete events. Additionally, to enable TextToSpeechComplete events for a given utterance, you must set an UtteranceId value for that utterance when you call the Speak command.
A TextToSpeechComplete event message includes the following key/value pairs:
Error(boolean) - This value istrueif Misty's text-to-speech engine threw an error or if playback was interrupted by aStopSpeakingcommand.Interrupted(boolean) - This value istrueif playback was interrupted by aStopSpeakingcommand before Misty reached the end of the utterance.UtteranceId(string) - The identifier of the utterance that raised this event. You set theUtteranceIdfor a given utterance when you invoke theSpeakcommand. Misty does not raiseTextToSpeechCompleteevents for utterances that do not have anUtteranceId.
TimeOfFlight
Misty has four edge and four range time-of-flight sensors that provide a single stream of raw proximity data. These sensors send TimeOfFlight messages that you can subscribe to in your skills and robot applications.
You can change how frequently a TimeOfFlight subscription gets messages by adjusting the value of the debounceMS parameter when you subscribe to the WebSocket connection.
A TimeOfFlight event message includes the following key/value pairs:
created- A timestamp that tells us when the system created the message.distanceInMeters- The distance (in meters) of the nearest object the sensor detects.sensorId- An identification string associated with a specific time-of-flight sensor. InTimeOfFlightevents, the value ofsensorIdtells us which sensor sent the message. See the Time-of-Flight Sensor Details table for a list ofsensorIdvalues and their corresponding time-of-flight sensors.status- A status code from the sensor that provides additional context for the distance reading in aTimeOfFlightevent message. At the macro level,0indicates the distance reading is valid;100codes are warnings (the system has low confidence in the value); and200codes are errors (the distance value is not reliable and should probably be discarded). Status codes are different for edge and range time-of-flight sensors. For a list of status codes and their descriptions, see the Time-of-Flight Status Codes section below.type- A string value indicating whether this message comes from aRangeorEdgetime-of-flight sensor. See the Time-of-Flight Sensor Details table for a list of which sensors belong in each category.
// Example message from Misty's front-right "edge" time-of-flight sensor
{
"eventName": "TimeOfFlight",
"message": {
"averageTimeMs": 31,
"created": "2019-12-18T18:37:17.3061319Z",
"distanceInMeters": 0.027,
"inHazard": false,
"sensorId": "tofdfr",
"sensorPosition": "DownFrontRight",
"sigma": null,
"signal": 18392,
"status": 0,
"type": "Edge"
}
}
Time-of-Flight Sensor Details
| Sensor Position | sensorName |
sensorId |
type |
|---|---|---|---|
| Right Front | toF_Right |
toffr |
Range |
| Left Front | toF_Left |
toffl |
Range |
| Center Front | toF_Center |
toffc |
Range |
| Back | toF_Back |
tofr |
Range |
| Downward Front Right | toF_DownFrontRight |
tofdfr |
Edge |
| Downward Front Left | toF_DownFrontLeft |
tofdfl |
Edge |
| Downward Back Right | toF_DownBackRight |
tofdrr |
Edge |
| Downward Back Left | toF_DownBackLeft |
tofdrl |
Edge |
Time-of-Flight Status Codes
Range Sensor Status Codes
Event messages from Misty's range time-of-flight sensors include one of the following status codes:
| Status Code | Name | Meaning |
|---|---|---|
-1 |
Unknown |
An unknown error. The system uses this code as a catch-all for errors that do not map to one of the codes below. |
0 |
RangeValid |
The distance reading is valid. The sensor received good data, and its readings fell within the thresholds set for both sigma and signal. |
101 |
SigmaFail |
The distance reading may not be accurate. The system sends this code when the standard deviation (sigma) of the sensor's readings is higher than the threshold set in Misty's firmware. You are more likely to see this code when Misty is operating in bright environments, or when the sensor points toward a flat surface at an angle. |
102 |
SignalFail |
The distance reading may not be accurate. The system sends this code when the return signal is too weak for the sensor to provide good data. You are more likely to see this code when the target of a sensor is too far away, not reflective enough, or too small. |
103 |
ROIOutOfBounds |
Each range time-of-flight sensor is comprised of a 16x16 array of detectors. The region of interest for each sensor can be adjusted to allow a different area of the sensor to read return signals. This allows us to change which direction the sensor "sees". (This is similar to the way that you can move your eyes to look in different directions, albeit with more restricted movement.) If the chosen region of interest is outside the 16x16 array of detectors, the system returns a distance value of 8191 with a 103 status code. The region of interest is currently set internally on Misty's system and cannot be adjusted. You will not see this error until the ability to change the region of interest is exposed. |
104 |
OutOfBounds |
The distance reading may not be accurate. The system sends this code when the sensor sees a target further away than 1.2 meters. While Misty's range time-of-flight sensors do return distance values for targets further away than 1.2 meters, the sensor's proximity calculations are less accurate when the target is outside this range. Bear this mind when using distance values that come back with this status code. |
207 |
WrapTargetFail |
The distance reading is not accurate due to range aliasing. This can happen when the sensor's target is highly reflective and outside the sensor's measurable range. This error can cause the sensor to read the distance of an object further than ~1.3 meters as being within range of the sensor. When you receive a 207 error, you can calculate the approximate distance of the target by adding 1.3 meters to the measured distance that Misty returns. |
Edge Sensor Status Codes
Event messages from Misty's range time-of-flight sensors include one of the following status codes:
| Status Code | Name | Meaning |
|---|---|---|
-1 |
Unknown |
An unknown error. The system uses this code as a catch-all for errors that do not map to one of the codes below. |
0 |
RangeValid |
The distance reading is valid. The sensor received good data, and its readings fell within the thresholds set for both sigma and signal. |
201 |
HardwareFail |
The sensor failed to initialize due to an internal error. Because the system automatically attempts to reinitialize the sensors, and because these sensors do not send messages until they are fully initialized, it is unlikely that you will see this code. Errors 201 - 205 only happen at time of initialization. |
202 |
HardwareFail2 |
The sensor failed to initialize due to an internal error. Because the system automatically attempts to reinitialize the sensors, and because these sensors do not send messages until they are fully initialized, it is unlikely that you will see this code. Errors 201 - 205 only happen at time of initialization. |
203 |
HardwareFail3 |
The sensor failed to initialize due to an internal error. Because the system automatically attempts to reinitialize the sensors, and because these sensors do not send messages until they are fully initialized, it is unlikely that you will see this code. Errors 201 - 205 only happen at time of initialization. |
204 |
HardwareFail4 |
The sensor failed to initialize due to an internal error. Because the system automatically attempts to reinitialize the sensors, and because these sensors do not send messages until they are fully initialized, it is unlikely that you will see this code. Errors 201 - 205 only happen at time of initialization. |
205 |
HardwareFail5 |
The sensor failed to initialize due to an internal error. Because the system automatically attempts to reinitialize the sensors, and because these sensors do not send messages until they are fully initialized, it is unlikely that you will see this code. Errors 201 - 205 only happen at time of initialization. |
206 |
EarlyConvergence |
The sensor has not received a minimum number of return signals within 0.5 milliseconds. When this happens, the sensor cancels measurement to conserve power and returns this status code. You are most likely to see this code when there is nothing in view of the sensor within its range of detection. |
207 |
MaxConvergence |
The sensor failed to detect a valid target after the maximum amount of time allowed for convergence. |
208 |
RangeIgnore |
The number of returned signals is less than the threshold set in Misty's firmware, AND the measured distance of any returned signals is less than the crosstalk distance (7 mm) set in the firmware. You should only see this message if there are no solid objects within the sensor's range, causing the sensor to read its protective lens as the strongest signal. You might see this error if the sensor is over an edge, picked up in the air, or if Misty is tipped over. |
211 |
Signal-To-NoiseRatioFail |
Too much ambient light is washing out the sensor's returned signals. You are most likely to see this error when shining a light directly into the sensor. |
212 |
RawRangeUnderflow |
The system has produced a negative value for the proximity of the nearest target. This typically happens when the target is closer than the offset distance the system uses in proximity calculations (or, in other words, if the target is closer than 10mm). You might see this error if you place your finger on the sensor's lens, or when the sensor is measuring the distance of bright target between 1.2 and 1.5 meters away. |
213 |
OutOfBounds |
The sensor's target is too far away and the system cannot calculate an accurate distance value. You should only see this status when the sensor's target is more than 200mm away from the sensor. |
214 |
RangingUnderflow |
The system has produced a negative value for the proximity of the nearest target. This typically happens when the target is closer than the offset distance the system uses in proximity calculations (or, in other words, if the target is closer than 10mm). You might see this error if you place your finger on the sensor's lens, or when the sensor is measuring the distance of bright target between 1.2 and 1.5 meters away. |
TouchSensor
The TouchSensor data stream sends information each time one of the capacitive touch sensors on Misty's head is touched or released. In the TouchSensor data object, the value of the sensorPosition property is one of the following strings, indicating which sensor triggered the event:
ChinHeadLeftHeadRightHeadBackHeadFrontScruff
The value for isContacted is a boolean indicating whether the sensor was touched (true) or released (false). The TouchSensor data object also provides “pose” information about Misty at the time of the event.
Sample TouchSensor data:
TouchSensor{
"eventName":"TouchSensor",
"message":{
"created":"2019-01-09T22:55:20.5300385Z",
"expiry":"2019-01-09T22:55:21.5300385Z",
"isContacted":true,
"pose":{
"bearing":1.0303768429594167,
"created":"2019-01-09T20:11:03.2951639Z",
"distance":0.09899494809418499,
"elevation":-0.9409567798080669,
"frameId":"RobotHead",
"framesProvider":{
"rootFrame":{
"created":"2019-01-09T20:11:03.2013843Z",
"id":"RobotBaseCenter",
"isStatic":true,
"linkFromParent":{
"isStatic":true,
"parentFrameId":"",
"transformFromParent":{
"bearing":0,
"distance":0,
"elevation":0,
"pitch":0,
"quaternion":{
"isIdentity":true,
"w":1,
"x":0,
"y":0,
"z":0
},
"roll":0,
"x":0,
"y":0,
"yaw":0,
"z":0
},
"transformToParent":{
"bearing":3.141592653589793,
"distance":0,
"elevation":0,
"pitch":0,
"quaternion":{
"isIdentity":true,
"w":1,
"x":0,
"y":0,
"z":0
},
"roll":0,
"x":0,
"y":0,
"yaw":0,
"z":0
}
}
}
},
"homogeneousCoordinates":{
"bearing":1.0303768429594167,
"distance":0.09899494809418499,
"elevation":-0.9409567798080669,
"pitch":-1.399999976158142,
"quaternion":{
"isIdentity":false,
"w":0.7648422,
"x":0,
"y":-0.64421767,
"z":0
},
"roll":0,
"x":0.029999999329447746,
"y":0.05000000074505806,
"yaw":0,
"z":0.07999999821186066
},
"pitch":-1.399999976158142,
"roll":0,
"x":0.029999999329447746,
"y":0.05000000074505806,
"yaw":0,
"z":0.07999999821186066
},
"sensorId":"cap",
"sensorPosition":"HeadLeft"
},
"type":"TouchSensor"
}
VoiceRecord
The VoiceRecord event type provides information about the speech capture recordings that Misty creates with the CaptureSpeech or StartKeyphraseRecognition commands. VoiceRecord events trigger after the completion of a speech capture attempt.
Note: Misty cannot use her microphones for recording speech while actively streaming audio and video.
Note: This event type is currently in Beta, and related hardware, firmware, or software is still under development. Feel free to use this command, but recognize that it may behave unpredictably at this time.
VoiceRecord event messages include the following properties:
- success (bool) - Whether Misty successfully detected speech and captured a distinct speech recording within the parameters you defined in the correlated
CaptureSpeechorStartKeyPhraseRecognitioncommand. - errorCode (int) - A number associated with a specific error that prevented Misty from creating a captured speech recording. The
ErrorMessageproperty of this event type holds the message associated with this code. The value of theerrorCodeproperty is"none"if Misty successfully created a recording with captured speech. - filename (string) - The filename the system used to save the captured speech recording.
- errorMessage (string) - A message with more detailed information about what may have prevented the successful creation of a speech recording.
{
"eventName":"VoiceRecord",
"message": {
"errorCode":0,
"errorMessage":"Detected end of voice command.",
"filename":"capture_HeyMisty.wav",
"success":true
}
}
WorldState
The WorldState named object exists to provide information about things Misty perceives in her environment, including:
- the locations of perceived objects
- the times they were perceived
Note: The WorldState event type is currently in Alpha and can't be used for much at this time. Many of the properties Misty sends in WorldState event messages are reserved for future use, and may have null or invalid values.
{
"eventName": "WorldState",
"message": {
"characteristics": [],
"objects": [
{
"class": null,
"id": 1,
"individual": null,
"isSensible": true,
"location": {
"bearing": -0.5584253393087596,
"bearingThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"distance": 0.15293597670901554,
"distanceThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"elevation": 0.38783942844582714,
"elevationThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"pose": {
"bearing": -0.5584253393087596,
"created": "2019-09-09T19:15:10.7842637Z",
"distance": 0.15293597670901554,
"elevation": 0.38783942844582714,
"frameId": "WorldOrigin",
"framesProvider": {
"rootFrame": {
"created": "2019-09-09T18:30:21.4398142Z",
"id": "RobotBaseCenter",
"isStatic": true,
"linkFromParent": {
"isStatic": true,
"parentFrameId": "",
"transformFromParent": {
"bearing": 0,
"distance": 0,
"elevation": 0,
"pitch": 0,
"quaternion": {
"isIdentity": true,
"w": 1,
"x": 0,
"y": 0,
"z": 0
},
"roll": 0,
"x": 0,
"y": 0,
"yaw": 0,
"z": 0
},
"transformToParent": {
"bearing": 3.141592653589793,
"distance": 0,
"elevation": 0,
"pitch": 0,
"quaternion": {
"isIdentity": true,
"w": 1,
"x": 0,
"y": 0,
"z": 0
},
"roll": 0,
"x": 0,
"y": 0,
"yaw": 0,
"z": 0
}
}
}
},
"homogeneousCoordinates": {
"bearing": -0.5584253393087596,
"distance": 0.15293597670901554,
"elevation": 0.38783942844582714,
"pitch": 1.5696512460708618,
"quaternion": {
"isIdentity": false,
"w": 0.7075245,
"x": -0.0000965454237,
"y": 0.7066889,
"z": -0.0000882303138
},
"roll": -0.21764267965049405,
"x": 0.12007024884223938,
"y": -0.0750148594379425,
"yaw": -0.21763145560213495,
"z": -0.05783873423933983
},
"pitch": 1.5696512460708618,
"roll": -0.21764267965049405,
"x": 0.12007024884223938,
"y": -0.0750148594379425,
"yaw": -0.21763145560213495,
"z": -0.05783873423933983
},
"unitOfMeasure": "None"
},
"statistics": {
"durationContinuouslyPerceived": "00:00:00",
"firstPerceived": "2019-09-09T19:15:08.9239249Z",
"mostRecentlyPerceived": "2019-09-09T19:15:10.7842637Z"
},
"timeStamp": "2019-09-09T19:15:10.7842637Z"
},
{
"class": null,
"id": 2,
"individual": null,
"isSensible": true,
"location": {
"bearing": -2.4473488655806275,
"bearingThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"distance": 0.1320835387735192,
"distanceThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"elevation": -0.4793232003535818,
"elevationThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"pose": {
"bearing": -2.4473488655806275,
"created": "2019-09-09T19:15:10.7842637Z",
"distance": 0.1320835387735192,
"elevation": -0.4793232003535818,
"frameId": "WorldOrigin",
"framesProvider": {
"rootFrame": {
"created": "2019-09-09T18:30:21.4398142Z",
"id": "RobotBaseCenter",
"isStatic": true,
"linkFromParent": {
"isStatic": true,
"parentFrameId": "",
"transformFromParent": {
"bearing": 0,
"distance": 0,
"elevation": 0,
"pitch": 0,
"quaternion": {
"isIdentity": true,
"w": 1,
"x": 0,
"y": 0,
"z": 0
},
"roll": 0,
"x": 0,
"y": 0,
"yaw": 0,
"z": 0
},
"transformToParent": {
"bearing": 3.141592653589793,
"distance": 0,
"elevation": 0,
"pitch": 0,
"quaternion": {
"isIdentity": true,
"w": 1,
"x": 0,
"y": 0,
"z": 0
},
"roll": 0,
"x": 0,
"y": 0,
"yaw": 0,
"z": 0
}
}
}
},
"homogeneousCoordinates": {
"bearing": -2.4473488655806275,
"distance": 0.1320835387735192,
"elevation": -0.4793232003535818,
"pitch": -1.5696512460708618,
"quaternion": {
"isIdentity": false,
"w": 0.00008819939,
"x": 0.7066889,
"y": 0.00009651453,
"z": 0.7075245
},
"roll": 0.21757214098211117,
"x": -0.09007161110639572,
"y": -0.07498423755168915,
"yaw": 2.924042367538678,
"z": 0.06091412156820297
},
"pitch": -1.5696512460708618,
"roll": 0.21757214098211117,
"x": -0.09007161110639572,
"y": -0.07498423755168915,
"yaw": 2.924042367538678,
"z": 0.06091412156820297
},
"unitOfMeasure": "None"
},
"statistics": {
"durationContinuouslyPerceived": "00:00:00",
"firstPerceived": "2019-09-09T19:15:08.9239249Z",
"mostRecentlyPerceived": "2019-09-09T19:15:10.7842637Z"
},
"timeStamp": "2019-09-09T19:15:10.7842637Z"
},
{
"class": null,
"id": 3,
"individual": null,
"isSensible": true,
"location": {
"bearing": 0.5579833753366954,
"bearingThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"distance": 0.17502626966973778,
"distanceThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"elevation": 0.6283228116298827,
"elevationThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"pose": {
"bearing": 0.5579833753366954,
"created": "2019-09-09T19:15:10.7842637Z",
"distance": 0.17502626966973778,
"elevation": 0.6283228116298827,
"frameId": "WorldOrigin",
"framesProvider": {
"rootFrame": {
"created": "2019-09-09T18:30:21.4398142Z",
"id": "RobotBaseCenter",
"isStatic": true,
"linkFromParent": {
"isStatic": true,
"parentFrameId": "",
"transformFromParent": {
"bearing": 0,
"distance": 0,
"elevation": 0,
"pitch": 0,
"quaternion": {
"isIdentity": true,
"w": 1,
"x": 0,
"y": 0,
"z": 0
},
"roll": 0,
"x": 0,
"y": 0,
"yaw": 0,
"z": 0
},
"transformToParent": {
"bearing": 3.141592653589793,
"distance": 0,
"elevation": 0,
"pitch": 0,
"quaternion": {
"isIdentity": true,
"w": 1,
"x": 0,
"y": 0,
"z": 0
},
"roll": 0,
"x": 0,
"y": 0,
"yaw": 0,
"z": 0
}
}
}
},
"homogeneousCoordinates": {
"bearing": 0.5579833753366954,
"distance": 0.17502626966973778,
"elevation": 0.6283228116298827,
"pitch": 1.5696512460708618,
"quaternion": {
"isIdentity": false,
"w": 0.7075245,
"x": -0.0000965454237,
"y": 0.7066889,
"z": -0.0000882303138
},
"roll": -0.21764267965049405,
"x": 0.12012173235416412,
"y": 0.07497323304414749,
"yaw": -0.21763145560213495,
"z": -0.10287846624851227
},
"pitch": 1.5696512460708618,
"roll": -0.21764267965049405,
"x": 0.12012173235416412,
"y": 0.07497323304414749,
"yaw": -0.21763145560213495,
"z": -0.10287846624851227
},
"unitOfMeasure": "None"
},
"statistics": {
"durationContinuouslyPerceived": "00:00:00",
"firstPerceived": "2019-09-09T19:15:08.9239249Z",
"mostRecentlyPerceived": "2019-09-09T19:15:10.7842637Z"
},
"timeStamp": "2019-09-09T19:15:10.7842637Z"
},
{
"class": null,
"id": 4,
"individual": null,
"isSensible": true,
"location": {
"bearing": -3.1415883669408133,
"bearingThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"distance": 0.4359997212269757,
"distanceThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"elevation": 0.0011690930720143118,
"elevationThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"pose": {
"bearing": -3.1415883669408133,
"created": "2019-09-09T19:15:10.7358941Z",
"distance": 0.4359997212269757,
"elevation": 0.0011690930720143118,
"frameId": "WorldOrigin",
"framesProvider": {
"rootFrame": {
"created": "2019-09-09T18:30:21.4398142Z",
"id": "RobotBaseCenter",
"isStatic": true,
"linkFromParent": {
"isStatic": true,
"parentFrameId": "",
"transformFromParent": {
"bearing": 0,
"distance": 0,
"elevation": 0,
"pitch": 0,
"quaternion": {
"isIdentity": true,
"w": 1,
"x": 0,
"y": 0,
"z": 0
},
"roll": 0,
"x": 0,
"y": 0,
"yaw": 0,
"z": 0
},
"transformToParent": {
"bearing": 3.141592653589793,
"distance": 0,
"elevation": 0,
"pitch": 0,
"quaternion": {
"isIdentity": true,
"w": 1,
"x": 0,
"y": 0,
"z": 0
},
"roll": 0,
"x": 0,
"y": 0,
"yaw": 0,
"z": 0
}
}
}
},
"homogeneousCoordinates": {
"bearing": -3.1415883669408133,
"distance": 0.4359997212269757,
"elevation": 0.0011690930720143118,
"pitch": 0.0011815604520961642,
"quaternion": {
"isIdentity": false,
"w": -0.00000487849775,
"x": -0.000590780866,
"y": 0.000133459544,
"z": 0.9999998
},
"roll": 0.00026692497608394846,
"x": -0.43599942326545715,
"y": -0.0000018689764829105115,
"yaw": -3.141582738898105,
"z": -0.0005097241373732686
},
"pitch": 0.0011815604520961642,
"roll": 0.00026692497608394846,
"x": -0.43599942326545715,
"y": -0.0000018689764829105115,
"yaw": -3.141582738898105,
"z": -0.0005097241373732686
},
"unitOfMeasure": "None"
},
"statistics": {
"durationContinuouslyPerceived": "00:00:00",
"firstPerceived": "2019-09-09T19:14:48.53128Z",
"mostRecentlyPerceived": "2019-09-09T19:15:10.7358941Z"
},
"timeStamp": "2019-09-09T19:15:10.7358941Z"
},
{
"class": null,
"id": 5,
"individual": null,
"isSensible": true,
"location": {
"bearing": 2.447178387656334,
"bearingThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"distance": 0.13446667538055293,
"distanceThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"elevation": -0.511962016172321,
"elevationThreshold": {
"lowerBound": 0,
"upperBound": 0
},
"pose": {
"bearing": 2.447178387656334,
"created": "2019-09-09T19:15:10.7842637Z",
"distance": 0.13446667538055293,
"elevation": -0.511962016172321,
"frameId": "WorldOrigin",
"framesProvider": {
"rootFrame": {
"created": "2019-09-09T18:30:21.4398142Z",
"id": "RobotBaseCenter",
"isStatic": true,
"linkFromParent": {
"isStatic": true,
"parentFrameId": "",
"transformFromParent": {
"bearing": 0,
"distance": 0,
"elevation": 0,
"pitch": 0,
"quaternion": {
"isIdentity": true,
"w": 1,
"x": 0,
"y": 0,
"z": 0
},
"roll": 0,
"x": 0,
"y": 0,
"yaw": 0,
"z": 0
},
"transformToParent": {
"bearing": 3.141592653589793,
"distance": 0,
"elevation": 0,
"pitch": 0,
"quaternion": {
"isIdentity": true,
"w": 1,
"x": 0,
"y": 0,
"z": 0
},
"roll": 0,
"x": 0,
"y": 0,
"yaw": 0,
"z": 0
}
}
}
},
"homogeneousCoordinates": {
"bearing": 2.447178387656334,
"distance": 0.13446667538055293,
"elevation": -0.511962016172321,
"pitch": -1.5696512460708618,
"quaternion": {
"isIdentity": false,
"w": 0.00008819939,
"x": 0.7066889,
"y": 0.00009651453,
"z": 0.7075245
},
"roll": 0.21757214098211117,
"x": -0.09007984399795532,
"y": 0.07501709461212158,
"yaw": 2.924042367538678,
"z": 0.06587369740009308
},
"pitch": -1.5696512460708618,
"roll": 0.21757214098211117,
"x": -0.09007984399795532,
"y": 0.07501709461212158,
"yaw": 2.924042367538678,
"z": 0.06587369740009308
},
"unitOfMeasure": "None"
},
"statistics": {
"durationContinuouslyPerceived": "00:00:00",
"firstPerceived": "2019-09-09T19:15:08.9239249Z",
"mostRecentlyPerceived": "2019-09-09T19:15:10.7842637Z"
},
"timeStamp": "2019-09-09T19:15:10.7842637Z"
}
]
}
}
WorldState WebSocket messages are sent even if the data has not changed, as the data is sent via timed updates, instead of being triggered by events. The WorldState WebSocket can send data as frequently as every 100ms, though it is set by default to 250ms. To avoid having to handle excess data, you can change the message frequency for the WebSocket with the DebounceMs field, as shown in the lightSocket.js JavaScript helper.